ダンシングライダー メカグレードアップ編
今回は前回組み立てた「タミヤ社ダンシングライダー」に搭載していた
SANWA ビギナークラス様向けの送受信機(MX-V / RX37E)及び
サーボ(SRM-102Z)をミドルクラスの物に搭載しなおします。
以前にご紹介させて頂きました
ビギナークラス
・送信機 MX-V
・受信機 RX-37E
・サーボ SRM-102Z
を使用したダンシングライダーのフィーリングは
十分にご堪能して頂けた事と思います。
ご堪能されて現在、
「ラジコン休憩中。。。」
と言われるお客様には是非、この「メカグレードアップ編」をお読み頂きたいと
思います。
「メカグレードアップ編」では「ミドルクラス」にしておくにはもったいないくらいの
高性能の送信機「MT-44」、受信機はトップクラスも使用している「RX-471」
サーボはローコストながらもサーボの調整が出来る「PGS-CL」サーボを
ご紹介をさせて頂きます。
次からは今回紹介するメカへの組み換え作業に入っていきたいと思います。
①作業を進めていくため、ダンシングライダーの
a. 人形の取り外し
b. 受信機アンテナの取り外し
c. コネクターの取り外し
d. 配線(結束バンド)の取り外し
e. 受信機取り外し
f. リヤギヤデフユニット取り外し
g. メカプレート取り外し
h. サーボユニット取り外し
以上の作業を行います。
a.人形の取り外し
b.受信機アンテナの取り外し
c. コネクターの取り外し
d. 配線(結束バンド)の取り外し
e. 受信機取り外し
f. リヤギヤデフユニット取り外し
g. メカプレート取り外し
反対側も同様にネジを外してくださいね....。
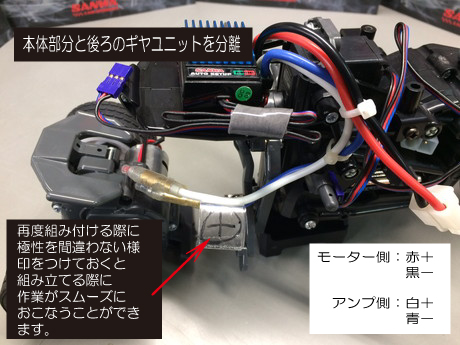
ここで注意ポイント!!
メカデッキを左右に広げてダンシングライダー本体から外す際に
下記の写真のパーツ(注意①)が、ポロリ・・・と外れる場合がありますので
ご注意ください・・・。
h. サーボユニット取り外し
以上が搭載していたメカの取り外し方法となります。
次は「グレードアップ」したメカの搭載方法に移りたいと
思います。
チョットここで、
筆休め。。。(^^)
今回メカの取り外しと取り付けに使用している工具を
ここで紹介させて頂きたいと思います。
今回使用している工具は3種類あります。
どれもタミヤ社から販売されている商品となります。
「+」ドライバーは前回もご紹介させて頂きました通り、
タミヤ製品組み立ての際に使用されております+ビスの大きさに
ベストマッチングし大変使いやすいドライバーです。
特に使用されておりますアルミビスはドライバーの大きさが違う場合
ネジ山が舐めてしまう恐れがあります。
今回ご紹介させて頂いております。
タミヤ社製ドライバーをご使用していただければ
その様な心配もかなり激減する事でしょう。。。
次にタミヤ社ニッパーのご紹介です。
今回ご紹介させて頂くニッパーは大変切れ味も良く
作業効率が大変捗るニッパーです。
ラジコン製品を組み立てる際に使用する事はもちろん、
三和社製サーボのリード線の長さを調整する際に
リード線をカットし、被覆を省く際にもとても切れ味がよく
作業がスムーズに行えます。。。(個人的な表現になってしまいすみませんでした。。。)
でも、それぐらい使いやすいニッパーです。。。(^^)
次にタミヤ社製のピンセットのご紹介です。
ご紹介させて頂くピンセットの材質はステンレス製でグリップ部分が
作業しやすくホールドしやすくなっております。
真ん中にタミヤ社のロゴも入っていてかっこいいですね。。。(^^)
ネジや作業する際にピンセットで挟む場合も先端が細く加工されておりますので
非常にピン先で作業しやすい形状となっております。
※今回ご紹介させて頂いた工具の感想は一個人の物でもありますので
実際にお客様自身がご利用なされてご確認ください。。。
ご紹介させて頂きました。工具の詳細はタミヤ社のホームページにて
ご確認頂けますよう、お願い申し上げます。
さて、「②」ここからはダンシングライダーへ組み込む
SANWA社制、MT-44(送信機)、RX-471(受信機)、PGS-CL(サーボ)のご紹介と
組み込み作業の説明となります。
②からはメカを搭載していきます。
i. サーボユニット作成作業
j. バインド作業
k. サーボニュートラル出し作業
l. リヤギヤデフユニット取り付け
n. 配線(結束バンド)の取り付け
o. 受信機アンテナの取り付け
p. MT-44送信機側「CODE10」設定方法
RX472「SSL」設定方法
q. MT-44/PGSサーボ設定画面(数値の入力方法)
皆様ご準備はよろしいですかぁ・・・。
それでは後半、ダンシングライダーにメカを搭載していきますね。。。
i. サーボユニット作成作業
今回搭載する「PGS-CL」サーボはロープロサーボタイプながら
「CODE10」を使用できます。
MT-44送信機+RX472受信機を使用する事により
MT-44送信機からPGS-CLサーボの調整が出来る様になります。
(※MT-44送信機からPGSサーボを調整する際にはCODE10機能を必ず設定する
事と、RX-472受信機の方でPGS-CLサーボのコネクターを「SSL」の差し込み
口へ挿入してください。)
次はバインド作業に移りたいと思います。
ちょっとその前に・・・。
※今回サーボがSRM-102ZからPGS-CLサーボへ積み替えるのにあたり、
サーボホーンを取り付けるネジが変更となります。
SRM-102Zサーボのファイナルギヤの材質が樹脂でしたが
今回使用するPGS-CLサーボのファイナルギヤの材質がアルミになります。
そのためサーボホーンを固定する際のネジ(ビス)が変更となります。
ご注意願います。
変更となるビスは下記の写真のとおりです。
3×10mmタッピングビスから
3×10mmミリネジ/ボタンビスに変更。
ご注意願います。。。m(_ _)m
送信機と受信機のバインド作業
ダンシングライダー本体のメカ接続方法
j.バインド作業
MT-44送信機側設定方法
①ジョグダイヤルでカーソルを「BAIND」に合わせます。
②カーソルが「BAIND」の所でエンター(ジョグダイヤルをプッシュ)を押します。
③バインド専用電波が送信機から出力されている事を示す表示が現れます。
「>>>>」左から右へ流れる「>」が表示されまます。
④送信機は③の状態のままRX-471受信機の「PUSH」ボタンを押しながら
アンプの電源スイッチを「ON」します。
そうすると、青色LEDが「フラッシュ点滅」→「消灯」します。
⑤送信機の「BACK」ボタンをプッシュします。
送信機からバインド専用電波が出ていたのが通常の電波出力となり
RX-471受信機と電波が繋がり「青色LEDが点灯」します。
これでバインド完了となります。
k.サーボニュートラル出し作業
l. リヤギヤデフユニット取り付け
n.配線(結束バンド)の取り付け
o.受信機アンテナの取り付け
p.MT44送信機側「CODE10」設定方法
①.送信機側のCODE10基本設定
システム
・AUX TYP設定
・CODEネーム設定
②.受信機RX472側PGS-CLサーボリード線接続方法
以上の基本セットを行います。
それでは...
基本セットを行っていきたいと思います。
①送信機MT-44側の「CODE10」基本設定
システム AUX TYP設定
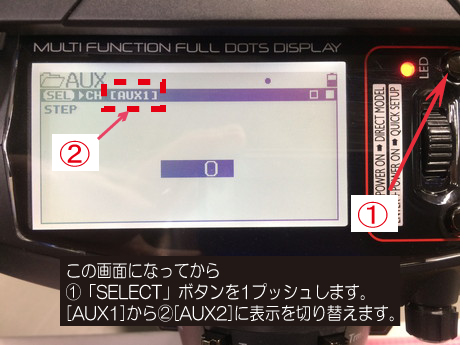
ジョグダイヤを1プッシュ、メニュー画面にします。
ジョグダイヤルでカーソルを「システム」に選択し、ジョグダイヤのエンターを
1プッシュします。
AUX TYPの画面で「AUX2」の項目
STEPをCODE10に変更します。
これでNOAからCODE10への変更が完了いたしました。
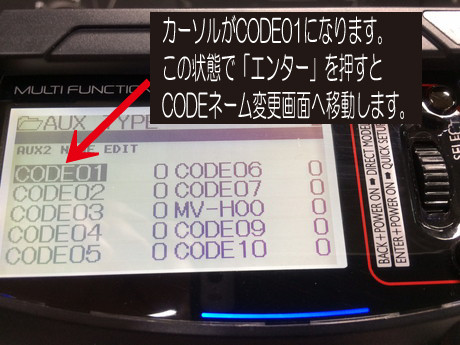
次はCODE10のCODEネームの変更についてご紹介させて頂きます。
・CODEネーム設定
これでコードネームの変更が完了いたしました。
※この画面では数値変更はできません。
②.受信機RX472側PGS-CLサーボリード線接続方法
これにて「SSL」接続方法は完了となります。
q.MT-44/PGSサーボ設定画面(数値の入力方法)
次は「PGS-CL」サーボの設定データーを登録していきます。
PGS-CLサーボの基本設定数値は下記の様になります。
・SSL-CH 1
・STRETC 30
・BOOST 30
・D-BAND 2
・MV-MID 50
・MV-END 30
・BRAKE 10
・MV-HLD 2
・MV-FRQ 80
・MAX-PW 100
※標準数値
今回、
タミヤ社 ダンシングライダーで最適な動きをする
セットを作りましたので是非お試しください。
ダンシングライダー専用
「PGS-CL」サーボセッテング・・・公開!!
・SSL-CH 1
・STRETC 50
・BOOST 26
・D-BAND 10
・MV-MID 50
・MV-END 55
・BRAKE 45
・MV-HLD 5
・MV-FRQ 80
・MAX-PW 100
ダンシングライダー専用設定をした画面が
下記の写真となります。
以上でSANWAメカによるグレードアップ編が全て終了となります。
ラジコンを走行される場合はマナーを守って
見ている方も楽しく思えるような遊び方をしましょう...。
大変長々と付き合い頂きまして
誠に有難うございました。
今後とも三和製品を
よろしくお願い申し上げます。